My Portfolio 📁
Welcome to my portfolio! Below are some of my recent projects...
FlowUp 🍃
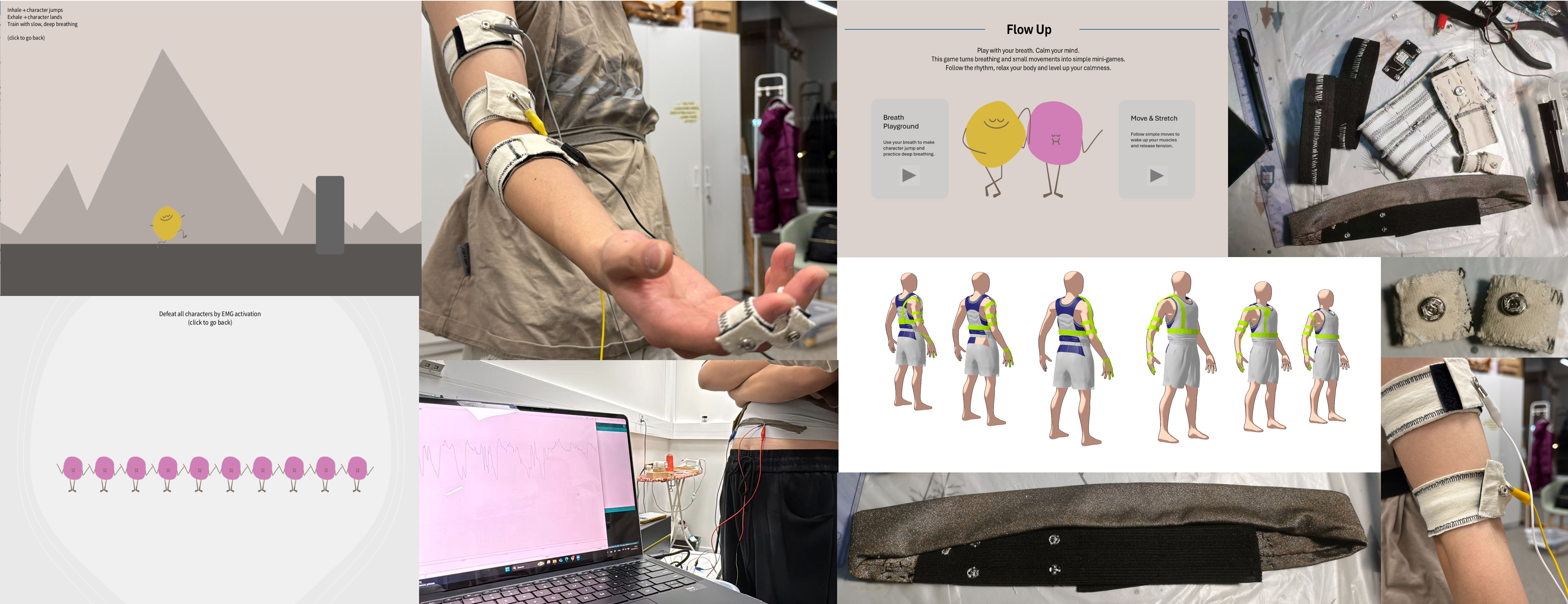
FlowUp is a physiological sensing smart garment designed to support stress reduction among university students by providing real-time feedback on breathing and muscle activity. The system combines textile-based respiration sensing, surface electromyography (sEMG), and galvanic skin response (GSR) sensing with an interactive game platform, transforming controlled breathing and body awareness into playful biofeedback exercises. Through user research, garment prototyping, and sensor testing, FlowUp explores how soft wearable systems can make everyday stress-management practices more engaging, accessible, and embodied.
In this project, I led the development of the smart garment. I participated in both technical and design-oriented tasks, including textile-based sensor design and fabrication, circuit and mainboard integration, sensor placement, data acquisition and preprocessing, and serial communication between Arduino and Processing. I also contributed to the development and user testing of the interactive game interface. The project allowed me to deepen my skills in physiological signal processing, e-textile fabrication, wearable ergonomics, and human-centered biofeedback interaction.
The project was developed at Aalto University as part of the ELEC-E7845 Smart Wearables II course. For more details about the FlowUp system and its development process, please click "Read More" below to see the project page.
DriveSense Smart Glove 🧤

The DriveSense Smart Glove combines textile-based sensors, wireless communication, and machine learning to control in-vehicle media and calls using hand gestures. The glove was developed through a series of design, testing, and refinement steps to ensure that it is both accurate and comfortable to use. The project demonstrates that gesture recognition can be achieved in real time using the SVM model, and that successful results require collaboration across disciplines.
In this project, I was responsible for a wide range of technical and creative tasks, including circuit and sensor design, sensor production, glove stitching, data collection and processing, wireless communication development, machine learning model training and deployment, as well as user interface design and implementation. I also participated in prototype testing and user testing. The project gave me the opportunity to learn about developing a smart wearable system, both in terms of hardware prototyping and real-time software solutions.
This project was done at Aalto University for the ELEC-E7840 Smart Wearables course. For more details about how the DriveSense Smart Glove functions, please click "Read More" below to see the project page.
Drones for National Security 🚀

"Drones for National Security" is an innovation project for DEMOLA that aims to address the growing threats posed by unauthorized drones near critical infrastructure. The solution involves the development of autonomous drones that can detect, monitor, and counter intruding drones in real time. The fleet utilizes advanced technologies such as machine learning, artificial intelligence, and 6G communications to operate autonomously while providing command and control capabilities to users. The project presents various scenarios such as counter-drone attacks, defensive fleet walls, and surveillance operations, and highlights the potential of autonomous drone systems to secure sensitive facilities such as nuclear power plants, water treatment plants, and power grids.
In the project, I was responsible for developing interactive simulations in Unity to simulate the capabilities of a drone fleet in defense and surveillance scenarios. These simulations demonstrated the drone fleet's ability to adapt to various threats, form defensive walls, and destroy intruders. I also designed and built a working drone prototype using OpenSCAD for 3D design, Arduino IDE and Processing for programming, and YOLOv5 in Python for machine learning-based object detection. The prototype included moving propellers, LED indicators, a radar system, an IP camera, and a weapon system. Autodesk/Fritzing were used for circuit layout design to ensure smooth integration of all components.
This project was closely related to my previous work "Defender X", and I expanded on many of its principles and features to further develop this solution. For more information and visuals, please visit the project page and check out the presentation at the National Demola Finals 2024 by clicking "Read More" below.
Pandabot 🐼

Pandabot is a panda-shaped robot designed to interact with humans through voice commands. It is capable of performing a variety of actions, including walking, sitting, following, exercising, dancing, greeting, playing ball, and relaxing. By integrating advanced functionalities with a user-friendly design, Pandabot features a machine learning-based speech recognition system, ultrasonic sensors for object detection and hand tracking, and voice capabilities for verbal interaction.
In this project, I developed the speech recognition system, integrated sensors and actuators, and calibrated servo motors to ensure precise and fluid motion. I designed Pandabot’s circuits using Fritzing and created its frame and assembly components using OpenSCAD for 3D modeling. This project provided an opportunity to delve into the intersection of robotics and artificial intelligence, enhancing my expertise in sensor integration, real-time processing, and speech recognition. It also deepened my understanding of human-computer interaction and gave me invaluable experience in designing intuitive, multifunctional robots.
This project was developed for a competition at Teknologia 23 event, which is the largest industrial event in the Nordic countries. For more details about how the voice recognition functions in Pandabot, please click "Read More" below to see my demo presentation for the competition.
Defender X 🔥
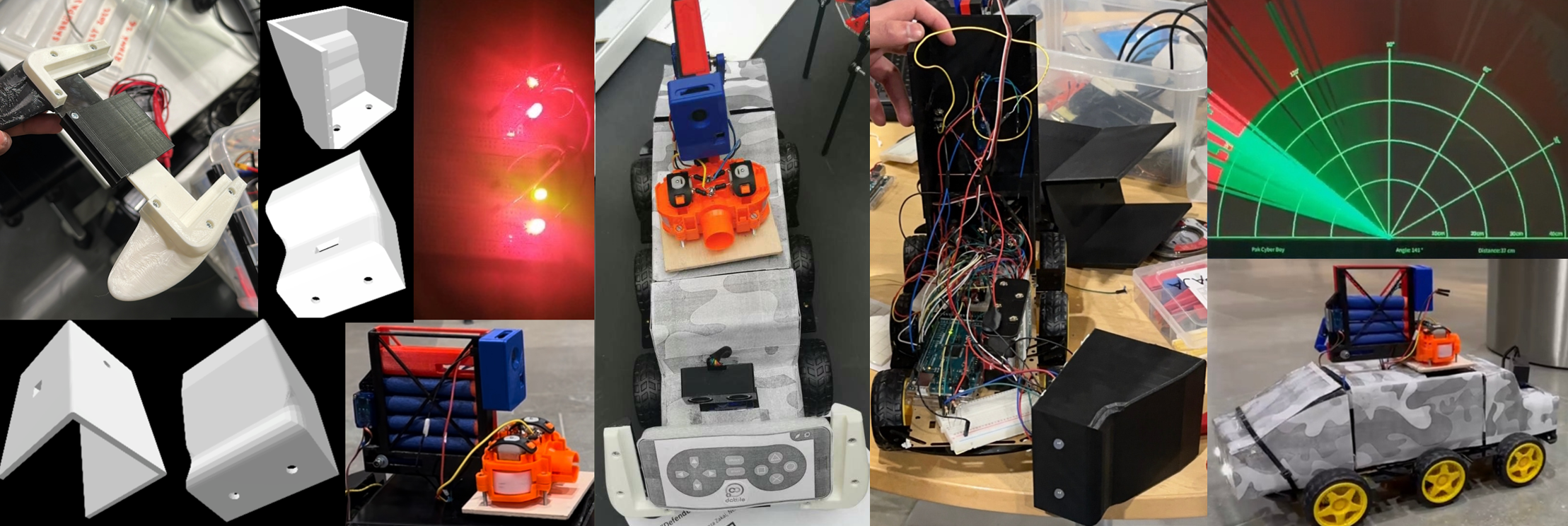
Defender X is a remote-controlled six-wheeled armored vehicle with an integrated cannon, IP camera and radar. The armored vehicle communicates with the controller via Bluetooth. In addition, the armored vehicle is also equipped with four RGB LED lights. This project was done at Aalto University for the ELEC-A4010 Electrical Engineering Workshop course.
In this project, I was responsible for programming and hardware/circuit integration, with a focus on ensuring the seamless functionality and interaction between electronic components and software systems. This role enabled me to develop and refine my proficiency in tools such as the Arduino IDE for embedded systems programming and Fritzing for detailed circuit design. Furthermore, I acquired valuable experience in utilizing Processing to create radar visualization interfaces, thereby expanding my technical competencies in both hardware and software integration.
The Dabble application was used for control, where all buttons were programmed for specific functions, such as car movements and cannon control. The lights also operate on user command. For safety reasons, the cannon mechanism is based on a Nerf gun. The magazine and cartridge feeding mechanism were built using 3D prints and connected to the acceleration mechanism.
The full documentation for this project is on the Aalto University Wiki. You can visit the documentation by clicking "Read More" below. Please note that the Aalto University Wiki requires user registration. To do it, please click "Log in with a separate user account" and follow the instructions on the page.